
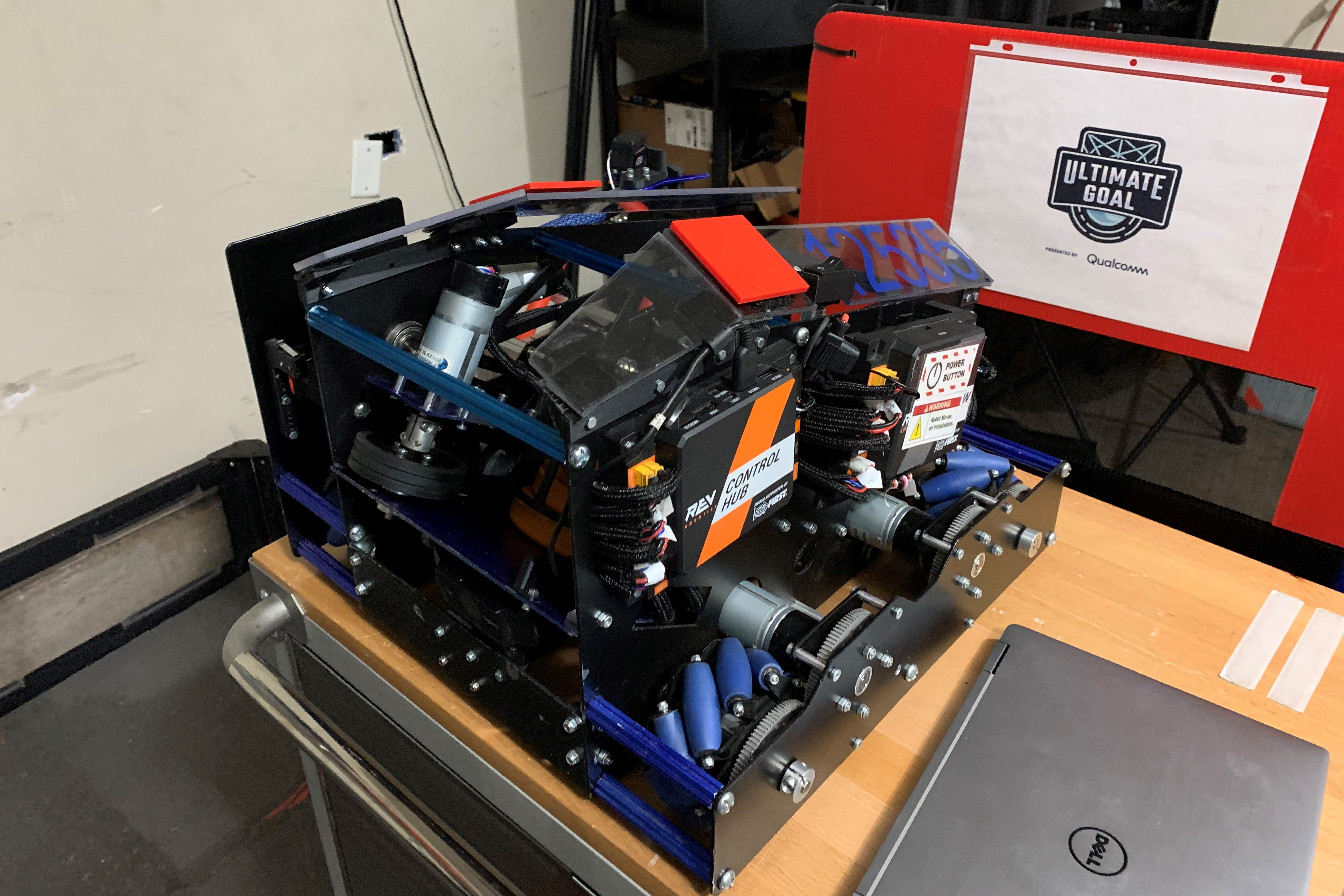
Our robot utilizes mechanum wheels inside of it's drivetrain for multi-directional movement. Mechanum wheels allow for strafing movement, which can be used to acheive 360 degrees of movement options. To intake rings we use GoBilda 72mm Gecko wheels connected by a timing belt and attached to a 312rpm 5202 series YellowJacket motor. The intake also has 30mm REV wheels to pick the rings off the ground and diliver them to the second set of Gecko wheels. This intake brings rings to our shooter. The shooter utilizes GoBilda 72mm DiscWheels as a flywheel attached to a Matrix 12V DcMotor. The rings are pushed by a super speed GoBilda 2000 series dual mode servo into the flywheel. To pick up wobble goals, the robot has a NeveRest 40:1 Gearmotor attached to a bevel gear set. The bevel gears rotate a aluminum pipe that has a claw attached to the end. The claw is a metal base with a REV Smart Servo attached. The servo has a 3D printed finger on it that grips the wobble goal.
